|
I am a Research Engineer at Google Deepmind (since July 2023). Previously, I was a 5th year MS student at UC Berkeley's AUTOLab, directed by Professor Ken Goldberg, where I worked on robotics research related to deformable object manipulation, leveraging language models, and reinforcement learning. Email / Résumé / Google Scholar / Twitter / Github / LinkedIn |

|
|
I'm interested in developing broadly intelligent robotic systems that can assist humans, automate difficult and tedious tasks, and aid humans in pushing society forward. Below are some of the research papers I have had the chance to work on and publish so far. |
.png)
|
Kaushik Shivakumar*, Vainavi Viswanath*, Anrui Gu, Yahav Avigal, Justin Kerr, Jeffrey Ichnowski, Richard Cheng, Thomas Kollar, Ken Goldberg Accepted into IEEE International Conference on Robotics and Automation (ICRA), 2023. project page / arXiv Leveraging uncertainty quantification to actuate interactive perception primitives to autonomously untangle long cables. |
|
Ryan Hoque*, Kaushik Shivakumar*, Shrey Aeron, Gabriel Deza, Aditya Ganapathi, Adrian Wong, Johnny Lee, Andy Zeng, Vincent Vanhoucke, Ken Goldberg IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022. Oral presentation. project page / arXiv Conducted a study of cloud-based robotics research, where we developed novel algorithms based on behavior cloning to smooth and fold real garments with one arm. |
.png)
|
Vainavi Viswanath*, Kaushik Shivakumar*, Justin Kerr, Brijen Thananjeyan, Ellen Novoseller, Jeffrey Ichnowski, Alejandro Escontrela, Michael Laskey, Joseph E. Gonzalez, Ken Goldberg Robotics: Science and Systems (RSS), 2022. Oral presentation. Best Systems Paper Award Recipient project page / arXiv A study on how to best combine ML-based perception and motion primitives to perform a very challenging deformable manipulation task of untangling long cables. |
|
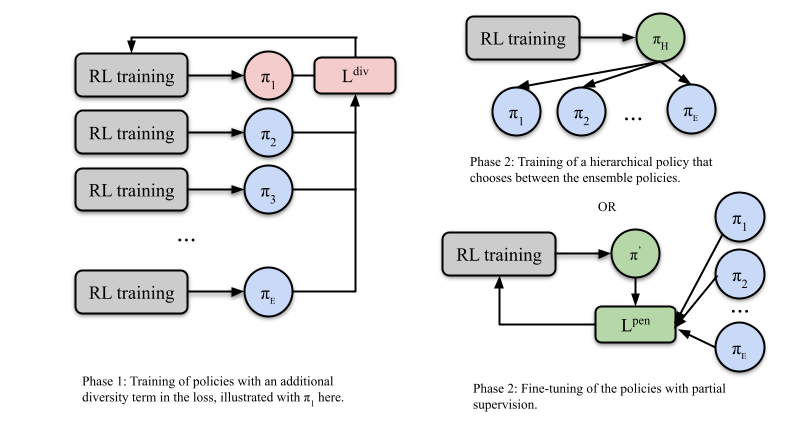
Simeon Adebola*, Satvik Sharma*, Kaushik Shivakumar* (listed alphabetically) arXiv, 2022 arXiv In this work, we study how we can use pretrained ensembles – encouraged via a KL-divergence in their loss function to be as diverse as possible – to then generalize to new tasks using Reinforcement learning. |
|
Below are some other/older research projects I've worked on. |
|
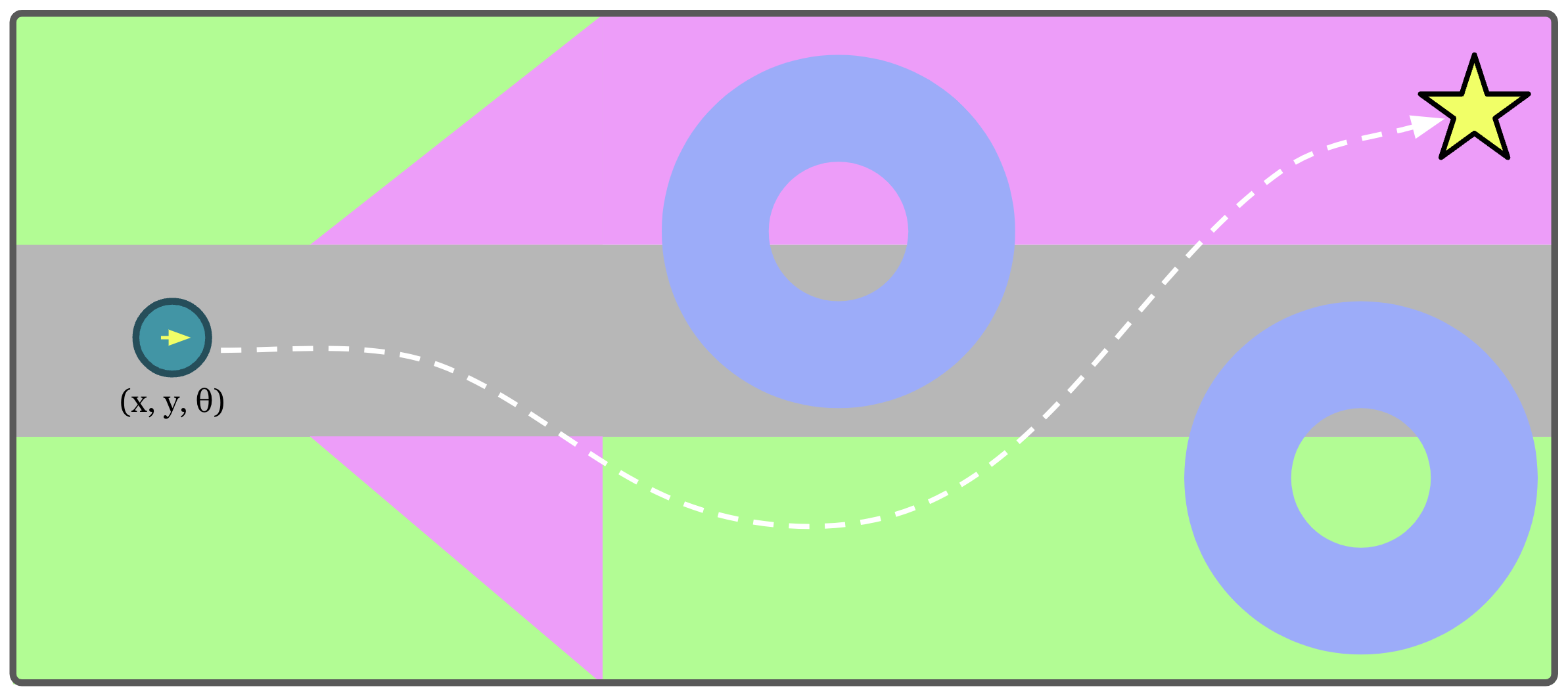
Ryan Adolf*, Tarun Amarnath*, Jeremy Hughes*, Kaushik Shivakumar* (listed alphabetically) EECS 106B Final Project, Spring 2022. Studied the problem of autonomously identifying and navigating terrain using visual features to map to driveability characteristics. |
|
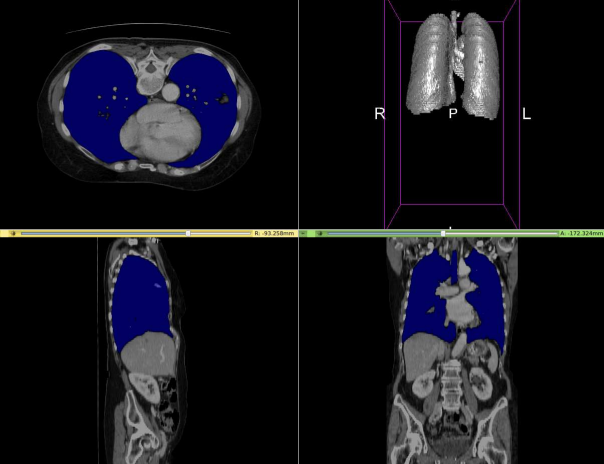
Blaine Rister, Darvin Yi, Kaushik Shivakumar, Tomomi Nobashi, Daniel L. Rubin Sci Data 7, 381 (2020). arXiv / paper Using deep learning for organ segmentation from 3D CT-scans of patients. |
|
Kaushik Shivakumar IEEE BIBM Conference, MABM Workshop (Madrid) 2018. Oral presentation. Abstract in AACR 30th Annual Special Conf Convergence. Used large-scale county datasets to identify the demographic and environmental factors that correlate and may cause cancer incidences across the United States. |
|
Link to template. |